
Software application for processing video images, using Computer Vision and Artificail Intelligence.
SmoothCV is optimized to handle pedestrian traffic.
The adopted global solution for acquiring knowledge consisted of carrying out four distinct phases.
The first phase, in real time, reads the video stream and records in a database (or file alternatively) some completely depersonalized information about the moving objects, basically a table with the following columns:
• Camera identification
• Identification number of the frame
• Object identification number
• Date/time (to the millisecond) of the object's position
• Position of the object (x, y)
• Dimensions of the object in the frame (width, height)
This phase applies different filters and parameters to improve the quality of the information collected, for example:
• Tuning of brightness, color, contrasts, distances, depth of field
• Generic dimensions and shapes of significant objects
• Object immobilization times
• Prediction of paths for path crossings between diverse pedestrians
The second phase is dedicated to the Geo-location of objects - projecting the location on the screen's frame to a three-dimensional geo-location in physical space.
The third phase consists of essentially heuristic AI processes, to improve the identification of objects and paths.
These heuristics are fundamentally well established – for example the impenetrability of matter tells us that two referents at the same time and place refer to the same object. Some of the issues addressed:
• Concatenation of paths with several referents, but which are assumed to belong to the same object. For example, if an object is lost in a position, it could be the same object that reappears in the same position, but was immobile.
• Two identical paths from two cameras are the same path
• Separation of compact groups
The fourth uses generally unsupervised machine learning processes.
However, some learning processes were carried out with images recorded from other places and for free use.
These processes make it possible to build new synthetic knowledge, from the output data of the previous phases (which, remember, are paths of mobile objects with a generic dimension and shape).
Some results are a consequence of well-established heuristics or theories, for example:
• Origin-Destination - entrance/exit from the space to another adjacent public space, periphery (with function)
• Travel speeds - average, moments (standard deviation, variance)
• Stops - shorts (with local<-> function), longs (with local<-> function), timing of traffic lights
• Type of object (pedestrians, vehicles) from speeds, dimensions, shapes and position on the lanes.
• Improper uses - pedestrians on the street, mechanical traffic on sidewalks, illegal parking, disregard for traffic signs, crossings outside the pedestrian crossings, etc
Other are important for Traffic Flow Theory
• Base speed - speed that would be maintained if the path was clear
• Traffic Densities along the day
• Empirical formula relating speed and densities, important to adjust calculations using traffic flow theory
• Clearance of the paths from physical obstacles.
Others use machine learning methods (generally - classification through clustering) to make an attempt at interpreting, classifying and standardizing, for example:
• types of routes or paths - passing through, access to the periphery of space (with their uses/functions), usufruct (shopping, monument, bus stop, terrace café), ambulatory / tourist routes - based on average speeds and their variability, deviation from the distance actually covered in relation to the optimal distance
• changes in locomotion parameters introduced by the various types of physical objects existing in spaces
• attraction (and repulsion) of certain locations, through proximity analysis of routes – for example shop windows
• types of distance between objects - approaching or distancing behaviors in relation to other objects (obstacles, other pedestrians/crowds, related groups (that move together))
• optimization of passing through paths in various traffic densities
• analysis of racionality of initial behavior (criteria used to ‘choose’ the route) - the fastest way, the path with fewer curves, first shorter section, first straightest section
• analysis of racionality for changing the route (criteria used to meet moving obstacles – other pedestrians, etc.) - distances of perception of novelty, degree of direction maintenance, left/right preference
• analysis of rationality for changing route (criteria used to meet new visibility conditions) - atraction/repulsion behaviors implying change of destination: prior knowledge of the space (the pedestrian has a mental plan of the space) or sensitivity to changes in visual perception, change in visibility, change in integration (space syntax), change in occlusivity (space syntax)
• analysis of other behaviors - organization of public transport stops, organization of waiting at the crossings
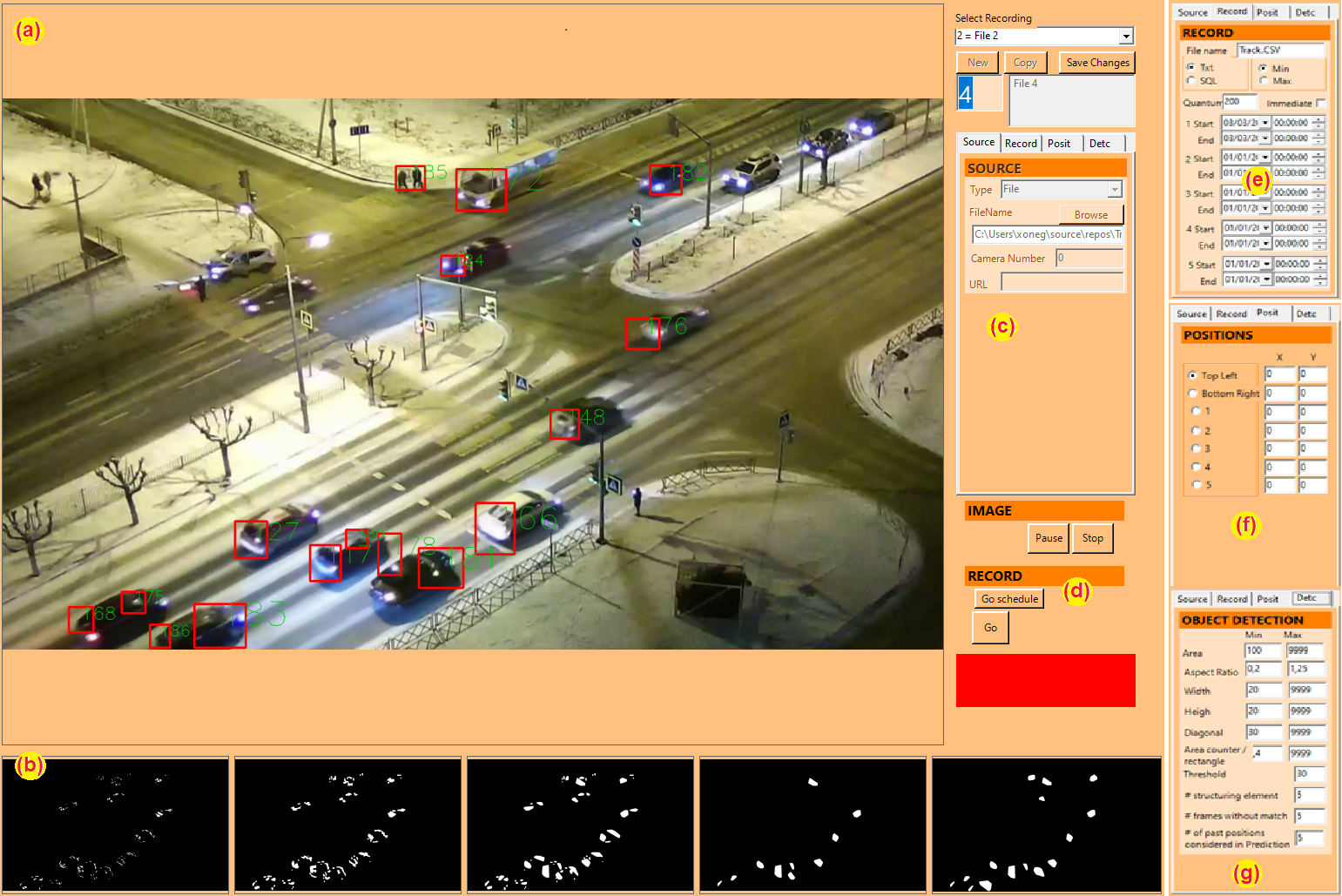
The real time phase of SmoothCV, for processing the images of the video cameras.
(a) is the monitoring area of the results obtained,
(b) is the monitoring area of the tuning of results of the filters for recognizing the movement of objects, which are updated in (g),
(c) is the selection of the cameras area,
(d) is the area of operation of images and recordings,
(e) is the area of selection of automatic recording periods and
(f) is the area of identification of coordinates in the image with specific points in real space.
If it is not possible to consult the a-posteriori images (for example due to personal data protection), it is necessary, in the recording preparation phase, to identify points necessary for the geo-referencing of the images (transformation of the coordinates on the screen into real coordinates)